1.
测定木块与长木板之间的动摩擦因数 , 通常需要测力计。如果没有测力计,能否测出它们之间的动摩擦因数呢?某实验小组根据转换测量的方法,测出了木块与长木板之间的动摩擦因数。测量的步骤和方法如图所示:
, 通常需要测力计。如果没有测力计,能否测出它们之间的动摩擦因数呢?某实验小组根据转换测量的方法,测出了木块与长木板之间的动摩擦因数。测量的步骤和方法如图所示:
①如图a,测出轻弹簧的自然长度;
②如图b,将木块悬挂在弹簧的下端,静止时测出弹簧的长度;
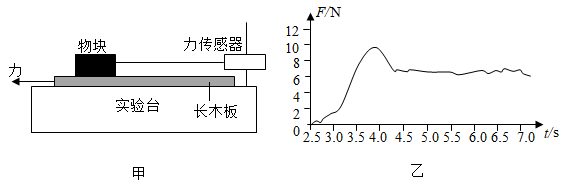
③如图c,将长木板固定在水平面上,用弹簧拉动木块在长木板上匀速运动,测出弹簧长度。

(1)根据测出的物理量,请你写出动摩擦因数的表达式=。(用“
、
、
”表示)
(2)在实验中同学们发现:如果按图d的方法,将弹簧一端连接木块,一端固定在竖直墙壁上,拉动长木板水平运动,测出弹簧长度 , 同样可以求得动摩擦因数
。比较图c和图d的两种方法,你认为图方法更好,原因是。
【考点】
滑动摩擦力与动摩擦因数;
基础巩固
能力提升
变式训练
拓展培优
真题演练