1.
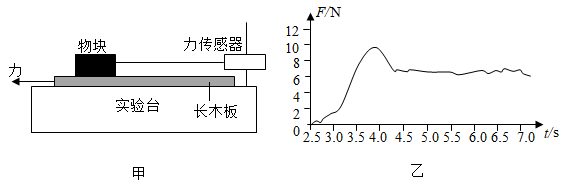
某同学用图甲所示的装置测量木块与木板之间的动摩擦因数。跨过光滑定滑轮的细线两端分别与放置在木板上的木块和弹簧测力计相连。
(1)下列说法正确的是。
A.实验前,应先对弹簧测力计调零 B.应保持与木块相连的细线水平
C.实验时,应将木板匀速向左拉出 D.实验时,拉木板的速度越大越好

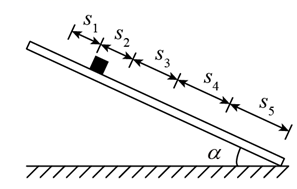
(2)图乙是某次实验中弹簧测力计示数放大图,木块受到的滑动摩擦力N。
(3)为进行多次实验,该同学采取了在木块上增加砝码个数的方法若木块质量为 , 砝码的质量、动摩擦因数和重力加速度分别用m、
和g来表示则,摩擦力
(用前面的物理量的字母表示)测得多组数据后,该同学描绘的
图线如图丙所示,则他测得的动摩擦因数
(重力加速度g取
)

【考点】
滑动摩擦力与动摩擦因数;
基础巩固
能力提升
变式训练
拓展培优
真题演练