1.
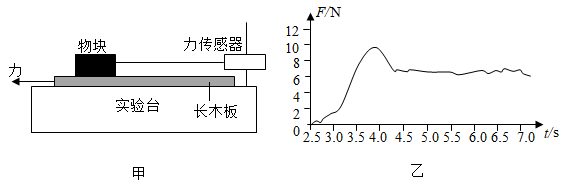
某同学用图(a)所示的装置测量木块与长木板间的动摩擦因数。长木板水平固定,木块通过水平轻绳绕过轻质光滑定滑轮连接重物。

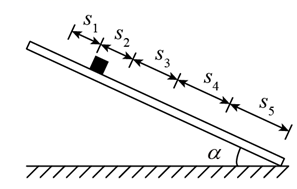
(1)实验时先接通打点计时器电源,再由静止释放重物,得到加速阶段的部分纸带如图(b)所示,A、B、C、D、E为打下的相邻的计数点,相邻计数点之间还有4个计时点未画出。
(2)测量得 ,
, 木块质量为M=0.5kg,重物质量为m=0.2kg。已知打点计时器的频率为50Hz,重力加速度
, 忽略纸带与打点计时器限位孔之间的阻力。则打下相邻计数点的时间间隔是s,木块运动的加速度是m/s2 , 木块与长木板间的动摩擦因数约为μ=。(后两空计算结果均保留2位有效数字)
【考点】
滑动摩擦力与动摩擦因数;
基础巩固
能力提升
变式训练
拓展培优
真题演练