1.
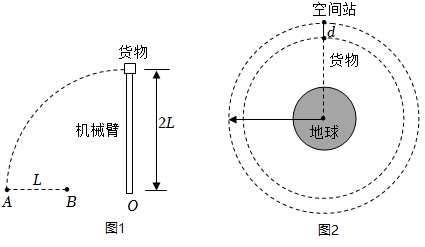
在轨空间站中物体处于完全失重状态,对空间站的影响可忽略.空间站上操控货物的机械臂可简化为两根相连的等长轻质臂杆,每根臂杆长为L.如图1所示,机械臂一端固定在空间站上的O点,另一端抓住质量为m的货物.在机械臂的操控下,货物先绕O点做半径为2L、角速度为ω的匀速圆周运动,运动到A点停下.然后在机械臂操控下,货物从A点由静止开始做匀加速直线运动,经时间t到达B点,A、B间的距离为L。
(1)
求货物做匀速圆周运动时受到的向心力大小Fn。
(2)
求货物运动到B点时机械臂对其做功的瞬时功率P。
(3)
在机械臂作用下,货物、空间站和地球的位置如图2所示,它们在同一直线上.货物与空间站同步做匀速圆周运动.已知空间站轨道半径为r,货物与空间站中心的距离为d,忽略空间站对货物的引力,求货物所受的机械臂作用力 与所受的地球引力
与所受的地球引力 之比。
之比。
【考点】
牛顿第二定律;
向心力;
万有引力定律的应用;
功率及其计算;
能力提升