1.
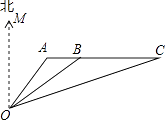
如图,一艘轮船位于灯塔B的正西方向A处,且A处与灯塔B相距60海里,轮船沿东北方向匀速航行,到达位于灯塔B的北偏东l5°方向上的C处.

(1)
求∠ACB的度数;
(2)
求灯塔B到C处的距离.(结果保留根号)
【考点】
解直角三角形的实际应用﹣方向角问题;
能力提升
真题演练