1.
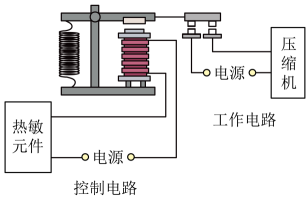
小聪利用光敏电阻为社区设计了一种自动草坪灯,其工作原理如图所示。工作电路中有两盏规格均为“220V 44W”的灯泡L,天暗时灯自动发光,天亮时灯自动熄灭。控制电路中电源电压U恒为6V,定值电阻R为200Ω。在一定范围内,光敏电阻R的阻值与光照强度E(光照强度E的单位为lx,光越强光照强度越大)之间存在一定关系,部分数据如下表所示。电磁铁的线圈电阻忽略不计,当天色渐暗,通过线圈的电流为0.02A时,恰好启动工作电路的照明系统。试问:
光照强度E/lx | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 |
光敏电阻R/Ω | 120 | 60 | 40 | 30 | 24 |
(1)随着光照强度减小,光敏电阻R的阻值(选填“增大”或“减小”),电磁铁的磁性(选填“增强”或“减弱”),当光照强度减小到一定值时,衔铁会被(选填“吸下”或“释放”),照明系统启动。
(2)两盏灯均正常发光时,工作电路中的总电流是多少?
(3)照明系统恰好启动时,光敏电阻R的阻值为多少?此时光照强度为多少?

【考点】
电磁继电器的组成、原理和特点;
基础巩固
能力提升
变式训练
拓展培优
真题演练