1.
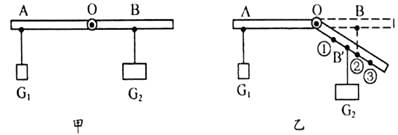
如图甲是一种落地式海报架,图乙是海报架的侧视结构示意图。

(1)
若视海报架为杠杆,水平向右的风将其吹倒的瞬间,支点是(选填“B”或“C”),请在图乙中画出此时重力G 的力臂l₂。
(2)
若要使海报架抵抗更大的风力,可采用的措施有。
【考点】
杠杆的平衡条件;
力臂的画法;